



























’ 오픈")



![[정종철] 뚜따에 진심인 형+과학자코스프레+현미경을구입했어
CPU 뚜따 교육자료ㅋㅋ](https://raptor-hw.net/xe/files/thumbnails/739/203/241x165.crop.jpg "뚜따에 진심인 형+과학자코스프레+현미경을구입했어")















지난겨울, 평창 밤하늘에 수호랑을 수놓았던 드론 쇼는 분명 감동적이었다. 하지만 당시 관객들이 간과한 게 하나 있다. 드론 스스로 하늘과 땅, 숲과 나무, 함께 비행하는 ‘동료 드론’을 알아보고 날아간 게 아니라 위성이 알려주는 공간 좌표에 따라 정해진 대로 움직였단 사실이 그것.
드론, 자동차처럼 운전하려면 ‘자율 비행’ 필수

무인 자동차가 거리로 나오려면 도로 환경을 스스로 인식할 수 있는 기술이 필요하다. 자율비행 드론이 도심의 하늘을 비행하려 할 때에도 마찬가지다. 물론 차이점은 있다. 무인 자동차는 공간적 여유가 비교적 많고 무게에 대한 제약 조건도 크지 않다. 대용량 배터리를 탑재하고 여러 대의 컴퓨터와 고성능 센서를 설치, 필요한 정보를 확보한 후 복잡한 알고리즘을 적용하면 주변 환경을 충분히 인식할 수 있다.

하지만 드론의 경우 상황이 좀 다르다. 일단 하늘을 날아야 하기 때문에 고성능 센서나 제어기를 탑재하기가 만만찮다. GPS[1] 기술을 활용하면 공간 좌표는 얻을 수 있겠지만 나무나 전신주, 건물을 인식하고 다른 드론과의 충돌을 피하게 만드는 건 굉장히 어려운 일이다. 무엇보다 목표 지점으로 날아가게 하려면 드론 스스로 주변 환경을 인식하도록 해야 한다. 이 지점에서 궁금증이 하나 생긴다. ‘만약 드론 택시가 실제로 존재한다면 어떻게 작동될까?’
드론 택시처럼 사람을 태울 수 있는 드론이 자동차만큼이나 널리 보급된다고 상상해보자. 비행기는 자가용(自家用)이라도 다른 기기와 수 킬로미터의 안전 거리를 유지하는 한편, 공항 관제탑과의 교신을 통해 자신(과 주변) 위치 관련 정보도 제공 받으며 운항한다(수 미터 떨어진 상태에서의 고속 편대 비행은 일부 파일럿만이 구사할 수 있는, 고도의 기술이다).
자동차 운전 상황을 떠올려보자. 좌우를 살피며 전방 주시에 신경을 써도 가끔 교통사고가 나는데 위아래, 전후좌우에서 드론이 날아다니는 상황이라면 어떨까? 드론 운전자의 기술이 얼마나 고도화돼야 할지 어렵잖게 상상할 수 있다. 더욱이 빌딩 숲으로 이뤄진 도심에서 GPS가 정확한 위치를 파악하는 일은 여간 어렵지 않다. 이런저런 상황을 짐작해볼 때 드론이 오늘날 자동차처럼 운전 가능한 기기가 되려면 자율 비행이 가능해져야 할 것이다.
자율 비행 드론의 기반 기술은 GPS 아닌 센서

드론에 탑재된 센서만 활용, 실내∙외 환경을 스스로 인식하며 비행하는 기술은 전 세계적으로 활발하게 개발 중이다. 드론 자율 비행 기술은 GPS를 기반으로 하지 않는다. 그 대신 드론에 장착된 각종 센서로 환경을 인식하고, 경로를 스스로 만든 후 장애물을 피해 원하는 목표 지점까지 비행한다.
이런 기술이 실제로 구현 가능하려면 크게 세 가지 기술이 필요하다. △주변 장애물과 드론의 상대적 위치를 인식하는 환경인식 기술 △GPS 없이 스스로의 동작과 위치를 인식하는 위치추정 기술 △목표 지점까지의 비행 경로를 생성, 이를 추종해 비행하는 제어 기술이 각각 그것. 드론이 안전하게 비행하려면 3차원 장애물을 스스로 인식하고 피하는 건 물론, 목적지를 향해 이동하는 동안 자기 위치나 자세도 인식해야 하기 때문이다.
주변 장애물이나 (비행하려는) 빈 공간을 인식하는 건 3차원 공간에서 ‘채워진’ 곳과 ‘빈’ 곳을 찾는 문제로 단순화할 수 있다. 이런 모델을 만들 때 가장 대표적으로 쓰이는 게 벨로다인(Velodyne) 센서, 그리고 스테레오비전[2]이다. 벨로다인 센서란 ‘라이다(LiDAR)’[3]로 불리는 레이저 거리 센서가 기계적으로 회전하면서 3차원 공간상의 물체 표면 좌표를 알려주는 장치다.
레이저 빔 수가 하나면 한 점에 대한 거리 정보를, (한 줄로 정렬된) 여러 개의 레이저 빔을 사용하면 평면에 그려진 물체에 대한 거리 정보를 각각 알아낼 수 있다. 라이다 센서 내 레이저 빔은 용도에 따라 최소 8개에서 최대 128개까지 다양하게 장착된다. 벨로다인 센서를 활용하면 이 라이다 센서를 기계적으로 360도 회전시켜 전 방향을 스캔할 수 있다.
환경 인식 실험서 ‘스테레오비전’ 활발히 도입

라이다 센서는 장단점이 뚜렷한 편이다. 가시광선 영역의 빛에 의존하는 카메라와 달리 밤에도 사용 가능하고 거리 정보를 직접적으로 얻을 수 있는 건 장점이다. 반면, 레이저 빔 수에 따라 정밀도(resolution)가 달라지기 때문에 라이다 센서가 확보한 이미지만으로 ‘길 건너는 사람’과 ‘바람에 날아가는 신문지’를 정확하게 구분해내긴 쉽지 않다(최근 우버 사고[4]에서도 이 같은 한계가 드러났다.)

여러 가지 문제가 있지만 라이다 센서는 여전히 무인 자동차 가동에 없어선 안 될 장치다. 하지만 큰 덩치 때문에 드론엔 널리 활용되지 못하고 있다. 지금도 일부에선 (무인 자동차에서 활용되듯) △소형 라이다를 기계적으로 회전시켜 △3차원 거리 정보를 생성한 후 △주변 환경을 인식해보려는 시도가 이뤄지고 있다. 만약 CCD 카메라[5]나 CMOS 센서[6]처럼 소형 칩(chip) 형태의 ‘장거리용 다채널’ 라이다 레이저 빔 센서가 개발된다면 무인 자동차는 물론, 드론 분야에서도 혁신적 기술 개발이 이뤄질 것이다.
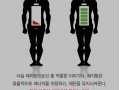
라이다 센서의 크기와 무게, 비행하는 드론 위에서 동적으로 작동하는 단점, 전력 문제 등으로 인해 일부에선 벨로다인 센서 대신 스테레오비전에 의존한 환경 인식 실험을 시도하고 있다. 이 경우, 두 개의 카메라를 사용하면 사람 눈과 같이 물체의 형상뿐 아니라 대략적 거리 정보까지 알아낼 수 있다. 삼각측량법을 쓰면 카메라를 한 대 사용하더라도 서로 다른 관찰 시점 간 이동 거리를 기반으로 카메라와 물체 간 거리를 계산하는 게 가능하다.

IMU·카메라 센서 함께 쓰면 거리 정밀 측정 가능
GPS 없이 드론의 위치나 동작을 알아내는 기술은 오늘날 가장 활발히 연구되는 분야 중 하나다. 한 대의 카메라를 활용하는 ‘모노큘러비전슬램(monocular vision SLAM[7])’이 대표적이다. 이 기술의 핵심은 한 장소에서 획득한 이미지와 이동 후 획득한 이미지 간 공통점을 아주 빠르게 찾아내는 것이다. 이때 공통되는 부분이 (고정된) 물체라면 그 변화에서부터 드론(카메라)의 이동 속도를 계산할 수 있다.
이처럼 ‘이미지 간 동일 지점의 지속 추적 기술’은 카메라로 물체를 인식하고 인식된 물체(나 카메라 이동) 위치를 추정하는 기본이다. 그 과정에서 흑백 정도나 주변 픽셀과의 차이 등 이미지의 국부적 특징이 활용된다. 다만 카메라로 얻은 이미지는 빛의 조건에 굉장히 민감하기 때문에 빛이 부족한 밤 시간대엔 사용하기 어렵다.

좀 더 현실적인 방법은 IMU 센서[8]와 카메라 센서를 함께 사용, 드론의 움직임을 추정하는 것이다. IMU 센서는 3축 가속도센서[9]와 3축 자이로센서[10]를 조합, 지자기[11] 방향을 기준으로 교정(calibration)하며 움직임을 포착하는 센서다. 흡사 자동차 속도계처럼 드론의 속도를 알려주는 센서로 이 속도를 적분[12]하면 카메라 한 대로도 이동 방향이나 거리를 보다 정확하게 측정할 수 있다. 단, 오차가 있는 속도를 적분해 이동 거리를 계산하는 만큼 멀리 갈수록 정확도가 낮아지는 점은 감안해야 한다.
경로계획, 전역·지역으로 구분… 인공지능 활용

마지막으로 짚어볼 기술은 경로계획(path plan)이나 작동제어와 관련돼있다. 경로계획은 전역(global)경로계획과 지역(local)경로계획으로 나뉜다. 전자는 ‘현 위치에서 목표 지점까지 어떻게 이동할지에 대한 고민’, 후자는 ‘바로 앞 장애물을 어떻게 피해갈지에 대한 고민’이라고 생각하면 된다.
전역경로계획에선 출발 시점에 주어지는 정보를 활용, 현재 위치에서 목표 위치까지 이동할 방법을 찾는다. 주로 인공지능이 적용되며 굉장히 많은 풀이가 존재한다. 일단 경로가 생성되더라도 드론이 이동하는 도중 환경 상태가 바뀔 수 있는데, 이를 실시간으로 반영해 원하는 경로를 효율적으로 찾아내야 한다. 반면, 지역경로계획은 실제 드론 동작을 기반으로 가까운 장애물을 회피하며 비행할 수 있도록 설계하는 게 관건이다. 제아무리 예쁘게 만들어진 경로도 드론이 그걸 제대로 추종할 수 없다면 곤란하다.

간단한 예를 하나 들어보자. 이전 칼럼에서도 살펴본 것처럼 드론 중 가장 흔한 형태는 4개 모터로 구동되는 쿼드로터다. 3차원 공간에서 드론은 3개 위치(x·y·z)와 3개 각도(롤·피치·요[13])를 모두 제어해야 한다. 보통 땐 위아래(z)와 제자리 회전(요), 롤과 피치 등 4개 동작이 가능하고 수평 면에서 앞으로 날아가려면 몸체를 앞으로 숙여야 한다. 만약 드론 앞에 하나의 벽이 있고 그 대각선 방향으로 작은 틈이 나있다면 드론은 충분한 거리를 도움닫기 한 후에야 자세를 틀어 벽을 통과할 수 있다. 이는 흡사 평형 주차를 잘하려면 빈 주차 공간을 바로 옆에 두고 앞뒤로 왔다갔다해야 하는 것과 비슷한 이치다. 자동차와 달리 제자리에서 멈춘 후 방향 바꾸기가 쉽지 않은 것 역시 드론 경로 설정 시 어려운 점 중 하나다.
‘자율 비행 드론 레이싱’ ADR 2년간 치러보니

ADR(Autonomous Drone Racing Competition)이란 행사가 있다. 자율비행 드론 기술을 평가하기 위해 2016년 내가 만든 대회다. 그해 대전에서 열린 국제지능형로봇학회(IROS)[14]를 시작으로 지난해엔 캐나다 밴쿠버(IROS 2017)에서 두 번째 행사가 마련됐다. 올해 대회 역시 스페인 마드리드(IROS 2018)에서 개최될 예정이다(유튜브에서 ‘ADR IROS’를 검색하면 관련 동영상을 찾아볼 수 있다, 올해 행사 안내는 여기 참조).

ADR은 드론에 탑재된 영상 센서를 기반으로 정사각형(1.5mx1.5m) 게이트의 빈 공간을 순차적으로 인식, 먼저 통과하면 승리하는 대회다. 주요 평가 항목은 △급회전 시 대처 능력 △수평 지그재그(혹은 나선형 상향) 경로 △움직이는 장애물을 인식하고 피해가는 기술 등이다. 특히 장애물의 경우, 시곗바늘 같은 게 달려있어 계속 움직이므로 이를 피해 통과하는 게 중요하다. 게이트는 눈에 잘 띄는 오렌지색으로 제작되지만 서로 겹쳐 보이기 때문에 정확한 인식이 쉽지 않다. 팀별로 주어지는 시간은 총 20분(2017년 대회 기준). 그동안 각 팀은 자율비행 드론을 띄워 그 드론이 정해진 순서에 따라 되도록 많은 장애물을 통과하게 해야 한다. 비행은 여러 차례 시도할 수 있다. 단, 새로 시작할 땐 출발 위치를 엄수해야 한다.
첫 대회 등록 팀은 7개국 11개. 하지만 이런저런 문제로 실제 참가 팀은 3개뿐이었다. 지난해에도 6개국에서 14개 팀이 등록을 마쳤지만 출전을 최종 확정 지은 건 7개 팀, 행사 당일 자율비행을 시도한 건 5개 팀에 불과했다. 2017년 대회 우승은 13개 게이트 중 9개 게이트를 3분11초6[15]의 기록으로 통과한 멕시코국립천체물리∙광학∙전자공학연구소(INAOE)[16] 팀에 돌아갔다. 스위스 취리히연방공과대학교(ETHZ)[17] 의 데이비드 스카라무자(Davide Scaramuzza) 교수 팀은 8개 게이트를 35초 8의 기록으로 통과, 2위에 올랐다(스카라무자 교수는 드론의 비행 컨트롤러[18] 로 많이 사용되는 픽스호크<Pixhawk>를 개발한 주인공이기도 하다). 국내에선 카이스트(KAIST) 팀이 첫 대회에서 10개 게이트를 1분26초5의 기록으로 통과, 우승을 거머쥐었지만 지난해엔 연습 비행 도중 드론이 망가지는 바람에 안타깝게도 제 기량을 펼치지 못했다.
관건은 장애물 인식과 경로계획, 작동제어 기술
두 차례의 ADR을 치르며 자율비행 드론 기술이 무인자동차에 비해 아직 여러모로 부족하단 사실을 다시 한 번 깨달았다. 앞서 언급한 주요 기술은 말할 것도 없고 호버링[19] 같은 기기 제어 기술 수준 역시 마빅(Mavic)처럼 정교한 동작 제어 능력을 갖추기엔 역부족인 게 현실이다. 드론이 비행 도중 실시간으로 장애물을 인식하고 그 정보를 활용, 비행 경로를 생성하며 정확히 제어하는 기술은 여전히 세계 각국에서 활발하게 연구 중이다. 이런 기술이 무르익을 수만 있다면 ‘도심 드론 비행’도 먼 미래 일만은 아닐 것이다.
[1]Global Positioning System. 위성에서 보내는 신호를 수신해 사용자의 현재 위치를 계산하는 위성항법시스템
[2]stereovision. 입체시(立體視). 두 눈의 망막에 맺히는 상(像)의 차이에서 얻어지는 깊이 지각
[3]레이저 발진기에서 광자를 내보내 주변 물체와 표면에서 충돌시킨 후 해당 광자가 되돌아오는 시간을 측정, 거리를 알아낸다
[4]올 3월 18일(현지 시각) 밤 미국 애리조나 템피에서 여성 보행자가 우버 자율주행 차량에 치여 사망한 사고. 당시 일부 전문가는 (라이다 등) 센서 오작동 의혹을 사고 발생 원인으로 제기했다
[5]전하결합소자(Charge-Coupled Device, CCD)를 사용해 영상을 전기 신호로 변환, 플래시 메모리 등의 기억 매체에 디지털 데이터 형태로 저장하는 장치
[6] Complementary Metal-Oxide Semiconductor. 렌즈를 통해 들어온 빛을 전기 신호로 바꿔 저장해주는 센서
[7]Simultaneous Localization And Map-building. 센서를 부착한 로봇이 여기저기 돌아다니며 외부 도움 없이 주변 환경 지도를 작성하는 기술
[8]Inertial Measurement Units. 관성측정장치
[9]이동하는 물체의 가속도나 충격의 세기를 측정하는 센서
[10]gyroscope. 회전하는 물체의 역학운동을 위치 측정이나 방향 설정 등에 활용하는 센서
[11]지구자기의 준말. 지구가 지닌, 자석으로서의 성질을 통칭하는 용어
[12]이동거리를 시간으로 나눈 게 속도이므로 이동거리를 구하기 위해선 속도를 시간에 따라 적분하면 된다
[13]roll·pitch·yaw. 용어별 설명은 이전 칼럼(밤하늘 화려하게 수놓는 ‘드론쇼’, 그 이면엔 어떤 기술이?)을 참조할 것
[14]international conference on Intelligent RObots and Systems
[15]ADR 기록은 움직인 거리가 빠른 시간보다 우선한다. 경주 규칙은 ADR 대회 홈페이지를 참조할 것
[16]Instituto Nacional de Astrofisica, Óptica y Electrónica(National Institute of Astrophysics, Optics and Electronics)
[17]Eidgenössische Technische Hochschule Zürich(Swiss Federal Institute of Technology Zurich)
[18]Flight Controller. 무선 조종 명령과 자이로센서 등의 입력에 따라 ESC(전자속도제어장치)에 모터 제어 신호를 보내는 장치
[19]hovering. 항공기 등이 일정 고도를 유지한 채 움직이지 않는 상태
보도 - 삼성전자